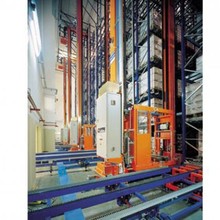
遼陽(yáng)文檔立體倉(cāng)庫(kù)
叉車 AGV叉車AGV具有激光導(dǎo)引系統(tǒng)���、控制臺(tái)和調(diào)度管理系統(tǒng)���、在線自動(dòng)充電系統(tǒng)、通訊系統(tǒng)及安全系統(tǒng)等���?��?刂婆_(tái)和調(diào)度管理系統(tǒng)是AGV系統(tǒng)的調(diào)度管理中心,負(fù)責(zé)與上位機(jī)交換信息,生成AGV的運(yùn)行任務(wù),并將指令下發(fā)給AGV完成相應(yīng)的任務(wù)。

設(shè)備狀態(tài)監(jiān)測(cè):平臺(tái)式AGV及叉車AGV 狀態(tài)監(jiān)測(cè)包括AGV位置監(jiān)測(cè)���、電量監(jiān)測(cè)���、載貨狀態(tài)監(jiān)測(cè)和運(yùn)行狀態(tài)監(jiān)測(cè)等;復(fù)合機(jī)器人狀態(tài)監(jiān)測(cè)包括位置監(jiān)測(cè)、電量監(jiān)測(cè)���、載貨狀態(tài)監(jiān)測(cè)���、使能狀態(tài)監(jiān)測(cè)和空閑狀態(tài)監(jiān)測(cè)等;雙臂機(jī)器人狀態(tài)監(jiān)測(cè)包括機(jī)器人使能狀態(tài)監(jiān)測(cè)���、機(jī)器人空閑狀態(tài)監(jiān)測(cè)、料臺(tái)上下料完成狀態(tài)監(jiān)測(cè)等;立體倉(cāng)庫(kù)狀態(tài)監(jiān)測(cè)包括立體倉(cāng)庫(kù)堆垛機(jī)使能狀態(tài)監(jiān)測(cè)���、空閑狀態(tài)監(jiān)測(cè)���、貨架中貨物狀態(tài)監(jiān)測(cè)、出入庫(kù)平臺(tái)空間狀態(tài)監(jiān)測(cè)���、出入庫(kù)平臺(tái)上下料完成狀態(tài)監(jiān)測(cè)等���。

旋轉(zhuǎn)處理模型
旋轉(zhuǎn)處理即以中心點(diǎn)為旋轉(zhuǎn)參考點(diǎn),旋轉(zhuǎn)修正,如圖10a所示。設(shè)定P0(x0 ,y0) 為輪廓中心點(diǎn)坐標(biāo),B(x23 ,y23)為待修正后矩形一邊的中心點(diǎn)坐標(biāo), A(x'23,y'23)為修正后矩形一邊的中心點(diǎn)坐標(biāo)���。根據(jù)P0和B點(diǎn)坐標(biāo)求得A點(diǎn)坐標(biāo),如式(3):
標(biāo)簽:文檔立體倉(cāng)庫(kù)遼陽(yáng)立體倉(cāng)庫(kù)
信息由發(fā)布人自行提供���,其真實(shí)性、合法性由發(fā)布人負(fù)責(zé)。交易匯款需謹(jǐn)慎���,請(qǐng)注意調(diào)查核實(shí)���。
 移動(dòng)版官網(wǎng)
移動(dòng)版官網(wǎng) 微信公眾號(hào)
微信公眾號(hào) 視頻號(hào)
視頻號(hào)